变换
齐次坐标(Homogeneous coordinates)
如果只用2*2矩阵,会发现无法表示二维平移(move)这种基本变换。因此人们想到了引入一个额外的维度,约定:
表示二维坐标点; 表示二维向量。
这样平移变换可表示为:
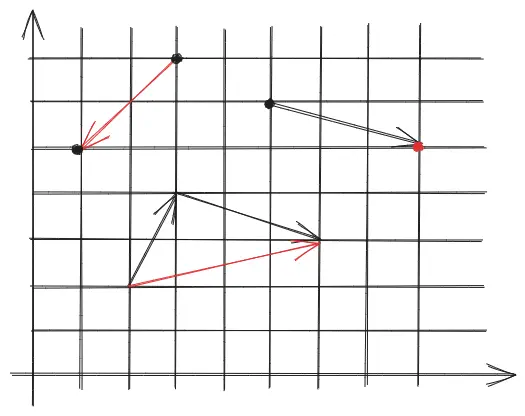
点和向量的加减产生了四种运算,进一步说明上面的“约定”不是空穴来风:
- 点减去点,运算的结果是向量,含义就是从一个点(减数)指向另一个点(被减数)的向量,如下图左上角
; - 点与向量运算,运算的结果是点,含义其实是从该点走向量到另一个端点,如下图右上角
; - 向量与向量运算,运算的结果是向量,含义是将两向量首尾相连,没有连起的另一首和尾组成的新向量,如下图中部
; - 点加上点?我们发现相加后额外的维度值变成了2,为了让额外的维度值保持为1,人为约定下,我们约定
代表的是 。根据这个约定,两点相加得到的是两者的中点。
有了齐次坐标,我们就可以把几个基本的变换都用一个矩阵表示:
- 缩放 (Scale) :
; - (绕原点)旋转 (Rotate) :
,一种简单的方法是代入特殊点推出矩阵各项的值。另外,可以发现这是一个正交矩阵; - 平移 (Translate) :
。 - 切变(Shear):
方向上为 , 方向上为 ; - 镜像(Mirror):
方向上为 , 方向上为 。
线性变换加上平移变换合称为仿射变换(affine transformation)。具体来说,线性变换使得我们能够计算类似的表达式:
,仿射将其拓展至 。
同时复杂的变换可以分解为若干小变换依次完成,问题规约为矩阵分解、求逆、乘法等。举个例子,绕点c旋转,可以先把对象平移到原点
三维变换
Rodrigues' Rotation Formula:绕轴
坐标系变换
视图变换(View transformation)
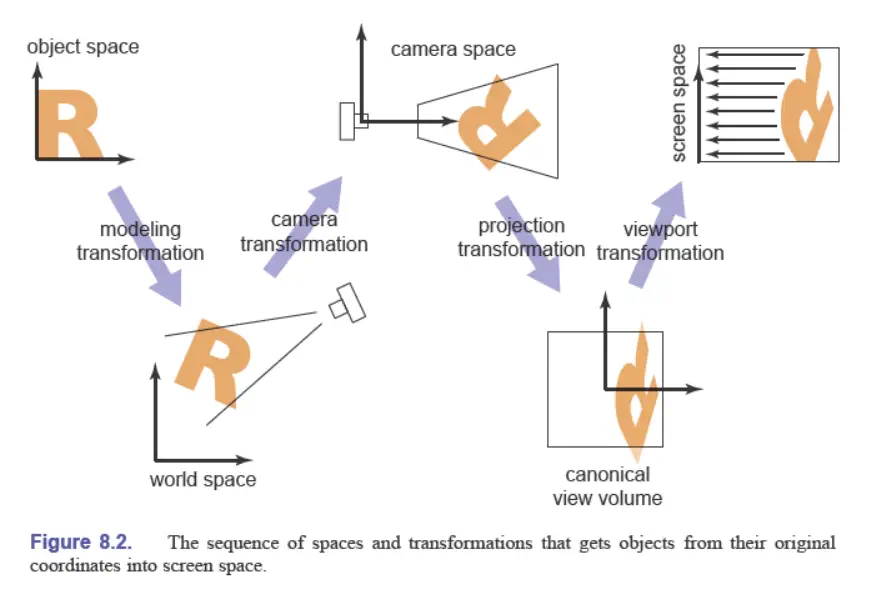
可以类比拍照:
- 找到一个好的位置放置目标:几何变换;
- 找一个好的角度来放置相机:视图变换;
- 拍照:投影变换。
视图变换(View/Camera transformation)
如何定义相机位置:
- Position:
; - Look at/gaze direction:
; - Up direction:
,可以想象手机横屏到竖屏的旋转,通过定义一个“向上”方向,消除这个角度的未知。
由于相机和物体一起运动,不会改变相机视角下的物体图像。因此不管相机怎么运动,总是可以通过移动物体得到相同的图像。为了简化表达,可以约定相机总是处于原点的位置,“up direction”向上的方向是 y,“look at”向右的方向 -z。
为了将相机移动到原点,我们需要做一个变换
- 将
移动到原点: ; - 将
旋转为 方向; - 将
旋转为 方向; - 将
旋转到 方向。
后三个存在技巧,我们要将任意向量旋转到x、y或z上并不容易,但是如果反过来,将x、y或z方向上的单位向量旋转到其他向量的矩阵很容易写出来(考虑谁乘上单位向量得到目标向量即可),而旋转矩阵是正交矩阵,有
投影变换(Projection transformation)
正交投影(Orthographic projection)
想象平行光源,或者无穷远处的点光源
惯用的做法,考虑任意长方体(orthographic view volumn),将其变换到标准视图大小(canonical view volumn),先平移,后缩放:
TIP
这一步做完之后长方体会被拉伸,不过,最终会通过一次视口变换(viewport transformation)来还原物体的形状。更准确的说,视口变换将裁剪空间(三维归一化设备坐标空间,canonical)坐标转换为屏幕坐标,这一过程深度保持不彼岸,因为我们在应用视口变换之前,一般已经用透视投影处理过深度变化了:
其中,
透视投影(Perspective projection)
想象点光源
也可以分两步理解:保持near不变,先“挤压”视椎体成为立方体,再做一个透视投影:

根据相似三角形,
未知的那行怎么求呢?观察整个挤压过程,有两个现象:
- near平面上的点在变换前后始终不变 -> near上点的z坐标记作
,变换后为 ,那么空行应该符合 的形式,即有 ; - far平面上的点,其
坐标在变换前后始终不变 -> 考虑far的中心点,它在挤压前后都不变。中心点的x和y坐标都是0,z坐标记作 ,则有 。
现在,可以解出A和B的值: